Dat is wel heel goedkoop idd
Cesco's Axial SCX10.2 Jeep Cherokee
-
johanv

- VIP
- Berichten: 2469
- Lid geworden op: 01 jun 2017 22:27
- Locatie: Heerenveen
 x 6
x 6- Gegeven waarderingen: 603 keren
- Ontvangen waarderingen: 303 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Groeten Johan.
Waar het asfalt eindigd begint het avontuur
Waar het asfalt eindigd begint het avontuur
-
daniel

- Donateur
- Berichten: 2327
- Lid geworden op: 27 mei 2017 19:44
- Locatie: Nijmegen
 x 1 x 16
x 1 x 16- Gegeven waarderingen: 179 keren
- Ontvangen waarderingen: 293 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Heb in Uden een tijdje samen met Frank gereden.
En heb hem in het echt mogen bewonderen.
Het is een hele mooie scaler geworden Frank.
Mag je trots op zijn.
Ook weer leuk om samen even gereden te hebben
En heb hem in het echt mogen bewonderen.
Het is een hele mooie scaler geworden Frank.
Mag je trots op zijn.
Ook weer leuk om samen even gereden te hebben
JS ScaleTeamdriver
Axial SCX10 6x6 kamaz Typhoon-K(The Beast)
SCX-10.2 VW Schwimmwagen
TA-02 General lee
SCX-10.2 Lada Niva custom
MST-CMX GMC VAN(THE A-TEAM)
Mst Blazing Blazer .
LCG Benetton beetle
CC-01 (Willy Jeep)
Traxxas 4x4 vxl Quad
Axial SCX10 6x6 kamaz Typhoon-K(The Beast)
SCX-10.2 VW Schwimmwagen
TA-02 General lee
SCX-10.2 Lada Niva custom
MST-CMX GMC VAN(THE A-TEAM)
Mst Blazing Blazer .
LCG Benetton beetle
CC-01 (Willy Jeep)
Traxxas 4x4 vxl Quad
-
Cesco

- Donateur
- Berichten: 2871
- Lid geworden op: 03 okt 2017 13:09
- Locatie: Emmen
- x 1 x 13
- Gegeven waarderingen: 933 keren
- Ontvangen waarderingen: 1088 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Na de meeting rit in Uden samen met de forumleden hier tijd om het volgende aan te pakken. Dit was voor de meeting niet meer gelukt. Namelijk de schokdempers nalopen, de afstelling ervan en waar mogelijk verbeteren. Bij voorkeur met de originele schokdempers, want ik probeer dit project zo veel mogelijk een budget build te houden. Nieuwe schokdempers kopen kan altijd nog indien nodig.
Eerste waar ik mee ben begonnen is veel inlezen en diverse afstellingen zoeken op forums en youtube. Daarna ben ik het gewoon gaan uitproberen. Uiteindelijk is elke RC auto toch net weer anders, het gaat er om jouw perfecte afstelling te vinden.
En meten is weten, dus eerst maar eens gestart met zien wat de flex is in standaard setup. En daar heb ik een handig hulpstuk voor waarmee je de RTI kan uitrekenen. Een 25 graden Scale RTI Ramp van Scalerfab. Hiermee kun je meten hoever een wiel omhoog kan waarbij de andere wielen nog op de grond blijven. Met een formule reken je de RTI uit, waarbij RTI staat voor Ramp Travel Index. Een meting die off-roaders gebruiken om de flex te meten. Een wat preciezere meting als de vaak op youtube getoonde wiel op spuitbus methode . De formule die er voor staat is als volgt.
. De formule die er voor staat is als volgt.
RTI: R= D/Bx1000. Hierbij vul je bij B de wielbasis van je crawler in in mm en bij D de afstand gemeten vanaf grond tot het hoogst behaalde punt van de ramp, waarbij je meet op het centerpunt van je wiel.
De ramp is hier te koop https://www.scalerfab.com/products/scal ... index-ramp, al heb ik de mijne via RC Scaler & Crawler Shop gekocht, gewoon in Nederland. Wordt in kaal metaal geleverd, ik heb de mijne zwart gemaakt met Hammerite, op de voorkant wat decals geplat en op de achterkant de formule toegevoegd. Hoef ik die nooit te zoeken. Altijd bij de hand.

Goed, meting dus zoals de auto er nu staat met de schokdempers zoals door de vorige eigenaar opgebouwd. Wiel basis (B) is 313mm, meting voorkant geeft een D van 94mm en daarmee een RTI van 300. Voor de achterkant kom ik op een D van 84mm en dus een RTI van 268. En daarmee is een startpunt bepaald. Hoogst haalbare D op deze ramp is overigens 141mm.
Grofweg als je jezelf op dit pad gaat bewegen kom je twee meningen tegen bij research.
1. Flex is goed, hoe meer hoe beter.
2. Flex is slecht, COG (center of gravity) is beter.
Vrij vertaald. De een zegt dat je in elke situatie altijd wielen op de grond wil houden en flex zou daar bij moeten helpen. Kort gezegd, als je een kuil tegenkomt zou het goed moeten zijn om je wiel er in te kunnen laten zakken en contact houden met de grond. Idem andersom als je over een bult of rots of ander obstakel zou willen. Hoeveel kan je omhoog flexen met je wiel en nog steeds met 3 wielen contact en aandrijving houden. Hiermee komt vaak, maar niet altijd, je auto hoger te staan.
De ander zegt dat je beter de setup lager (en vaak stugger) kan maken, want waarom een wiel in een kuil laten zakken als je ook dat wiel over een kuil kan tillen. Iets flex is goed, maar niet teveel.
Vaak zie je dat er een advies gedaan wordt zonder te kijken naar het terrein en ja heel veel rotsen komen wij nou ook niet tegen.
Mijn doelstelling is een afstelling die dus ergens het midden heeft tussen trail en echt crawlen gezien het landschap waar wij in ons landje mee te maken hebben. Dit wordt dus veel trail en error en al gaande leren wat het beste hier werkt.
Ik vond uiteindelijk een aantal tips die wel nuttig lijken, dus van start maar. Eerder poste ik al een video in dit topic van Youtuber JPRC (Joe) en ook in de blog op de Axial website vond ik nuttige tips voor meer flex. Eenvoudigste manier staat hier beschreven door Greg Vogel: http://www.axialracing.com/blog_posts/1073926305. Waar het op neerkomt is ruil je veren om. De veren die Axial in de handleiding van de SCX10.2 adviseert om op de voorste schokdempers te doen (medium) plaats die op je achterste schokdempers. En die van de achterste schokdempers (soft) plaats je op de voorste schokdempers. Verder draai je achter je shock hoops (schokdemperbevestigingen) om, dus links naar rechts en rechts naar links. Hierdoor zullen na hermontage je achterste schokdempers schuin komen te staan. Dit was het eerste wat ik geprobeerd heb. Omdraaien van de shock hoops gaat bij mij niet door de 3D geprinte binnenschermen. En die met de dremel aanvallen vond ik geen goed idee. Dus ik heb een alternatief ontworpen voor de zelfgemaakte Vanquish Yeti variant die Joe in zijn youtube video laat zien. Met meer instelmogelijkheden om te experimenteren. Tevens andere cups ge3Dprint, versie die je niet onderweg kan verliezen. Printer dus aan het werk gezet. De cups zijn een design van Adam @ Spare Time Hobbies en hier te downloaden: https://pinshape.com/items/26441-3d-pri ... spring-cup .

Goed, eerst maar eens de schokdempers uit elkaar gehaald. Olie eruit...... echo, ok, geen druppel olie in alle schokdempers. . Ik weet dat sommige zonder olie rijden, maar ik doe wel graag olie in mijn schokdempers. Ik heb geen lekken gezien in de tijd dat ik de auto heb, of er nooit olie ingedaan is kan ik niet zeggen. Het is in ieder geval weer goed dat ik het check. Verklaart wel waarom de achterkant zover doorzakte.

Schokdempers maar helemaal uit elkaar en volledig opnieuw opgebouwd. O-ringen tegen lekken behandeld met Team ASSOCIATED Green Slime gekocht bij onze sponsor https://www.rc-hp.de/Team-ASSOCIATED-Green-Slime-1105. Dit moet een olie lekvrije afdichting als resultaat geven. Ook de O-ring in de cap behandeld met green slime.

Een tip die ik ook uitgeprobeerd heb is een hele simpele om de COG omlaag te krijgen. Zie blog artikel van Greg Vogel op Axial website. http://www.axialracing.com/blog_posts/1073926252 . Met monteren van onderste schokdemperoog op het punt waar de link zit vastgeschroeft. zo verlaag je de COG met 8mm t.o.v. standaard onderste schokdemper bevestigingspunt.
Uiteindelijk heb ik verschillende setups en oliediktes gebruikt. Ik heb met Team ASSOCIATED 10W, 20W en 30W en Traxxas 35W olie geëxperimenteerd.
Onderstaande foto setup is vooral op basis van de Axial blogartikelen en die was geen succes. De schokdemper is boven gemonteerd op het punt waar deze zou uitkomen bij omdraaien van de shock hoops, hardheid veren gewisseld en onderste schokdemper bevestiging op link punt gemonteerd. Dus de COG omlaag. Dit was werkbaar voor de achterkant, maar de voorkant zakte volledig in, waarbij er geen vering meer was en de panhard de servo gewoon raakte. Ook andere olie mocht niet helpen, de veer was te zacht en duidelijk teveel COG.

Onderstaande foto geeft het verschil aan na veel uitproberen tussen bovenstaande setup en mijn uiteindelijke setup waarmee ik ga testrijden. Links zeg maar de Axial blog georiënteerde setup, rechts de setup van JPRC.

Ook hier weer het verschil bij de achteras. Rechts de Axial blog setup, links de setup gebaseerd op de adviezen van JPRC.
Veren gewoon zoals de Axial handleiding adviseert, voor 30WT en achter 20WT olie, bovenste schokdemper bevestiging lager gemonteerd net als bij JPRC en onderste schokdemper bevestiging gemonteerd op standaard bevestigingspunt.

Zelfde situatie, enige aanpassing aan de JPRC setup is nu onderste schokdemper bevestiging gemonteerd op link montage punt, dus dit zorgt voor een verlaging en verhoging van de COG.
Laatste setup van de zijkant bekeken.

Met laatste setup ga ik binnenkort test rijden. Op de werkbank lijkt dat tot nu toe de beste setup te zijn. Voorkant is nu perfect en achterkant lijkt ook goed. Ik heb meer flex kunnen creeëren, maar COG ligt redelijk zelfde als standaard. En door eenvoudig onderste schokdemperbevestiging te verplaatsen van normale bevestigingspunt naar link punt en terug kan ik redelijk snel extra flex of juist extra COG creëren. Enige wat daar nog mogelijk een verbetering kan zijn is ook daar van soft naar een middel veer te gaan. Dit i.v.m. wat toegevoegd gewicht aan de body achter, maar dat moet test rijden duidelijk maken. Voor nu lijkt alles een hele verbetering te zijn. Word vervolgd. Ben benieuwd hoe het gaat presteren en van de week ook even kijken hoe de RTI er nu voor staat.
Eerste waar ik mee ben begonnen is veel inlezen en diverse afstellingen zoeken op forums en youtube. Daarna ben ik het gewoon gaan uitproberen. Uiteindelijk is elke RC auto toch net weer anders, het gaat er om jouw perfecte afstelling te vinden.
En meten is weten, dus eerst maar eens gestart met zien wat de flex is in standaard setup. En daar heb ik een handig hulpstuk voor waarmee je de RTI kan uitrekenen. Een 25 graden Scale RTI Ramp van Scalerfab. Hiermee kun je meten hoever een wiel omhoog kan waarbij de andere wielen nog op de grond blijven. Met een formule reken je de RTI uit, waarbij RTI staat voor Ramp Travel Index. Een meting die off-roaders gebruiken om de flex te meten. Een wat preciezere meting als de vaak op youtube getoonde wiel op spuitbus methode
RTI: R= D/Bx1000. Hierbij vul je bij B de wielbasis van je crawler in in mm en bij D de afstand gemeten vanaf grond tot het hoogst behaalde punt van de ramp, waarbij je meet op het centerpunt van je wiel.
De ramp is hier te koop https://www.scalerfab.com/products/scal ... index-ramp, al heb ik de mijne via RC Scaler & Crawler Shop gekocht, gewoon in Nederland. Wordt in kaal metaal geleverd, ik heb de mijne zwart gemaakt met Hammerite, op de voorkant wat decals geplat en op de achterkant de formule toegevoegd. Hoef ik die nooit te zoeken. Altijd bij de hand.
Goed, meting dus zoals de auto er nu staat met de schokdempers zoals door de vorige eigenaar opgebouwd. Wiel basis (B) is 313mm, meting voorkant geeft een D van 94mm en daarmee een RTI van 300. Voor de achterkant kom ik op een D van 84mm en dus een RTI van 268. En daarmee is een startpunt bepaald. Hoogst haalbare D op deze ramp is overigens 141mm.
Grofweg als je jezelf op dit pad gaat bewegen kom je twee meningen tegen bij research.
1. Flex is goed, hoe meer hoe beter.
2. Flex is slecht, COG (center of gravity) is beter.
Vrij vertaald. De een zegt dat je in elke situatie altijd wielen op de grond wil houden en flex zou daar bij moeten helpen. Kort gezegd, als je een kuil tegenkomt zou het goed moeten zijn om je wiel er in te kunnen laten zakken en contact houden met de grond. Idem andersom als je over een bult of rots of ander obstakel zou willen. Hoeveel kan je omhoog flexen met je wiel en nog steeds met 3 wielen contact en aandrijving houden. Hiermee komt vaak, maar niet altijd, je auto hoger te staan.
De ander zegt dat je beter de setup lager (en vaak stugger) kan maken, want waarom een wiel in een kuil laten zakken als je ook dat wiel over een kuil kan tillen. Iets flex is goed, maar niet teveel.
Vaak zie je dat er een advies gedaan wordt zonder te kijken naar het terrein en ja heel veel rotsen komen wij nou ook niet tegen.
Mijn doelstelling is een afstelling die dus ergens het midden heeft tussen trail en echt crawlen gezien het landschap waar wij in ons landje mee te maken hebben. Dit wordt dus veel trail en error en al gaande leren wat het beste hier werkt.
Ik vond uiteindelijk een aantal tips die wel nuttig lijken, dus van start maar. Eerder poste ik al een video in dit topic van Youtuber JPRC (Joe) en ook in de blog op de Axial website vond ik nuttige tips voor meer flex. Eenvoudigste manier staat hier beschreven door Greg Vogel: http://www.axialracing.com/blog_posts/1073926305. Waar het op neerkomt is ruil je veren om. De veren die Axial in de handleiding van de SCX10.2 adviseert om op de voorste schokdempers te doen (medium) plaats die op je achterste schokdempers. En die van de achterste schokdempers (soft) plaats je op de voorste schokdempers. Verder draai je achter je shock hoops (schokdemperbevestigingen) om, dus links naar rechts en rechts naar links. Hierdoor zullen na hermontage je achterste schokdempers schuin komen te staan. Dit was het eerste wat ik geprobeerd heb. Omdraaien van de shock hoops gaat bij mij niet door de 3D geprinte binnenschermen. En die met de dremel aanvallen vond ik geen goed idee. Dus ik heb een alternatief ontworpen voor de zelfgemaakte Vanquish Yeti variant die Joe in zijn youtube video laat zien. Met meer instelmogelijkheden om te experimenteren. Tevens andere cups ge3Dprint, versie die je niet onderweg kan verliezen. Printer dus aan het werk gezet. De cups zijn een design van Adam @ Spare Time Hobbies en hier te downloaden: https://pinshape.com/items/26441-3d-pri ... spring-cup .
Goed, eerst maar eens de schokdempers uit elkaar gehaald. Olie eruit...... echo, ok, geen druppel olie in alle schokdempers. . Ik weet dat sommige zonder olie rijden, maar ik doe wel graag olie in mijn schokdempers. Ik heb geen lekken gezien in de tijd dat ik de auto heb, of er nooit olie ingedaan is kan ik niet zeggen. Het is in ieder geval weer goed dat ik het check. Verklaart wel waarom de achterkant zover doorzakte.
Schokdempers maar helemaal uit elkaar en volledig opnieuw opgebouwd. O-ringen tegen lekken behandeld met Team ASSOCIATED Green Slime gekocht bij onze sponsor https://www.rc-hp.de/Team-ASSOCIATED-Green-Slime-1105. Dit moet een olie lekvrije afdichting als resultaat geven. Ook de O-ring in de cap behandeld met green slime.
Een tip die ik ook uitgeprobeerd heb is een hele simpele om de COG omlaag te krijgen. Zie blog artikel van Greg Vogel op Axial website. http://www.axialracing.com/blog_posts/1073926252 . Met monteren van onderste schokdemperoog op het punt waar de link zit vastgeschroeft. zo verlaag je de COG met 8mm t.o.v. standaard onderste schokdemper bevestigingspunt.
Uiteindelijk heb ik verschillende setups en oliediktes gebruikt. Ik heb met Team ASSOCIATED 10W, 20W en 30W en Traxxas 35W olie geëxperimenteerd.
Onderstaande foto setup is vooral op basis van de Axial blogartikelen en die was geen succes. De schokdemper is boven gemonteerd op het punt waar deze zou uitkomen bij omdraaien van de shock hoops, hardheid veren gewisseld en onderste schokdemper bevestiging op link punt gemonteerd. Dus de COG omlaag. Dit was werkbaar voor de achterkant, maar de voorkant zakte volledig in, waarbij er geen vering meer was en de panhard de servo gewoon raakte. Ook andere olie mocht niet helpen, de veer was te zacht en duidelijk teveel COG.
Onderstaande foto geeft het verschil aan na veel uitproberen tussen bovenstaande setup en mijn uiteindelijke setup waarmee ik ga testrijden. Links zeg maar de Axial blog georiënteerde setup, rechts de setup van JPRC.
Ook hier weer het verschil bij de achteras. Rechts de Axial blog setup, links de setup gebaseerd op de adviezen van JPRC.
Veren gewoon zoals de Axial handleiding adviseert, voor 30WT en achter 20WT olie, bovenste schokdemper bevestiging lager gemonteerd net als bij JPRC en onderste schokdemper bevestiging gemonteerd op standaard bevestigingspunt.
Zelfde situatie, enige aanpassing aan de JPRC setup is nu onderste schokdemper bevestiging gemonteerd op link montage punt, dus dit zorgt voor een verlaging en verhoging van de COG.
Laatste setup van de zijkant bekeken.
Met laatste setup ga ik binnenkort test rijden. Op de werkbank lijkt dat tot nu toe de beste setup te zijn. Voorkant is nu perfect en achterkant lijkt ook goed. Ik heb meer flex kunnen creeëren, maar COG ligt redelijk zelfde als standaard. En door eenvoudig onderste schokdemperbevestiging te verplaatsen van normale bevestigingspunt naar link punt en terug kan ik redelijk snel extra flex of juist extra COG creëren. Enige wat daar nog mogelijk een verbetering kan zijn is ook daar van soft naar een middel veer te gaan. Dit i.v.m. wat toegevoegd gewicht aan de body achter, maar dat moet test rijden duidelijk maken. Voor nu lijkt alles een hele verbetering te zijn. Word vervolgd. Ben benieuwd hoe het gaat presteren en van de week ook even kijken hoe de RTI er nu voor staat.
Cesco RC Youtube / Cesco RC Instagram / Cesco's RC Collectie / Actueel bouwverslag: Tracrawler Build
-
Rctecto

- Donateur
- Berichten: 235
- Lid geworden op: 19 sep 2018 17:49
- Locatie: Woerden
- x 6
- Gegeven waarderingen: 131 keren
- Ontvangen waarderingen: 91 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Dit is leuk om te lezen. Mee eens dat niet alles om flex draait, maar wel interessant om het te kunnen vergelijken met zo’n RTI waarde. De testopstelling moet ook zelf te maken zijn. Ga ik uitproberen en kijken hoe ze bij mij scoren.
Ik heb de RTI score van jou Axial vergeleken met 1:1 auto’s en dan zie je dan de meeste 4x4’s (Toyota, Landrover, etc) hoger scoren. Bijvoorbeeld 400 – 500. Dat had ik niet verwacht omdat veel RC wagens voor mijn gevoel meer flex hebben dan realistisch is. Dat blijkt dus niet zo te zijn. Tenzij het vergelijk met 1:1 niet helemaal opgaat, maar ik kan zo snel niets bedenken waarom dat niet zo zou zijn.
Ik ben benieuwd hoe je tests verder uitpakken.
Ik heb de RTI score van jou Axial vergeleken met 1:1 auto’s en dan zie je dan de meeste 4x4’s (Toyota, Landrover, etc) hoger scoren. Bijvoorbeeld 400 – 500. Dat had ik niet verwacht omdat veel RC wagens voor mijn gevoel meer flex hebben dan realistisch is. Dat blijkt dus niet zo te zijn. Tenzij het vergelijk met 1:1 niet helemaal opgaat, maar ik kan zo snel niets bedenken waarom dat niet zo zou zijn.
Ik ben benieuwd hoe je tests verder uitpakken.
Arjan alias Rctecto
- RC4WD Gelande II / D90
- Tamiya CC01 / Ford F150
- Axial SCX10 II / Jeep Cherokee
- Axial SCX10 I / Toyota LC70 Dual cab
- Boomracing BRX01 / Mercedes G-wagon carry-all (in aanbouw)
- MST CM(f)X / Nissan Patrol K60 (in aanbouw)
- RC4WD Gelande II / D90
- Tamiya CC01 / Ford F150
- Axial SCX10 II / Jeep Cherokee
- Axial SCX10 I / Toyota LC70 Dual cab
- Boomracing BRX01 / Mercedes G-wagon carry-all (in aanbouw)
- MST CM(f)X / Nissan Patrol K60 (in aanbouw)
-
Mud monkey
- Donateur
- Berichten: 2078
- Lid geworden op: 02 jun 2017 23:49
- Locatie: Medemblik
- x 18
- Gegeven waarderingen: 22 keren
- Ontvangen waarderingen: 40 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Bij een 1:1 is de hoek van de ramp 45 graden , en de gene die dit middel gebruiken hebben hun veerpaket echt niet meer standaard
-
Rctecto
- Donateur
- Berichten: 235
- Lid geworden op: 19 sep 2018 17:49
- Locatie: Woerden
- x 6
- Gegeven waarderingen: 131 keren
- Ontvangen waarderingen: 91 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Op een ramp van 45 graden kom je inderdaad niet zonder serieuze aanpassingen.
Wat ik lees is dat de 1:1 metingen meestal gedaan worden op een helling van 20 graden.
Misschien zit daar het verschil of in de manier van meten.
@Cesco: meet je de afstand D langs de helling? Want zo wordt het bij 1:1 ook gedaan.
Ik denk dat jouw RTI dan ook hoger uit gaat komen.
Wat ik lees is dat de 1:1 metingen meestal gedaan worden op een helling van 20 graden.
Misschien zit daar het verschil of in de manier van meten.
@Cesco: meet je de afstand D langs de helling? Want zo wordt het bij 1:1 ook gedaan.
Ik denk dat jouw RTI dan ook hoger uit gaat komen.
Arjan alias Rctecto
- RC4WD Gelande II / D90
- Tamiya CC01 / Ford F150
- Axial SCX10 II / Jeep Cherokee
- Axial SCX10 I / Toyota LC70 Dual cab
- Boomracing BRX01 / Mercedes G-wagon carry-all (in aanbouw)
- MST CM(f)X / Nissan Patrol K60 (in aanbouw)
- RC4WD Gelande II / D90
- Tamiya CC01 / Ford F150
- Axial SCX10 II / Jeep Cherokee
- Axial SCX10 I / Toyota LC70 Dual cab
- Boomracing BRX01 / Mercedes G-wagon carry-all (in aanbouw)
- MST CM(f)X / Nissan Patrol K60 (in aanbouw)
-
Wouterb

- Donateur
- Berichten: 1227
- Lid geworden op: 02 jun 2017 09:24
- Locatie: Medemblik
- x 16
- Gegeven waarderingen: 97 keren
- Ontvangen waarderingen: 144 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Ik heb even zitten broeden, maar hiermee toch een paar opmerkingen op je verhaal
Het COG staat hier los van. Elk voertuig, object zelfs, heeft een COG. Het is een aanduiding van het punt waarop de zwaartekracht aangrijpt op het specifieke object. Je wilt het zo laag mogelijk hebben om omvallen te voorkomen.

Ik blijf bij mijn mening dat olie van ondergeschikt belang is bij onze manier van rijden. (al zijn er natuurlijk situaties te bedenken waarbij een verschil gemaakt had kunnen worden)
Een ‘teveel COG’? Elk object heeft een COG. Hoe hoog of hoe laag dit ook zit het gewicht blijft het zelfde dus ook de indrukking op de gegeven veer.
Wel tof dat je de moeite neemt dit allemaal uit te vogelen ( en er een epistel over te schrijven). Keep it up.
Statement 2 zou ik wat herschrijven; ‘2. Teveel flex is slecht’Cesco schreef: ↑24 okt 2018 02:49 Na de meeting rit in Uden samen met de forumleden hier tijd om het volgende aan te pakken. Dit was voor de meeting niet meer gelukt. Namelijk de schokdempers nalopen, de afstelling ervan en waar mogelijk verbeteren. Bij voorkeur met de originele schokdempers, want ik probeer dit project zo veel mogelijk een budget build te houden. Nieuwe schokdempers kopen kan altijd nog indien nodig.
….
Grofweg als je jezelf op dit pad gaat bewegen kom je twee meningen tegen bij research.
1. Flex is goed, hoe meer hoe beter.
2. Flex is slecht, COG (center of gravity) is beter.
Het COG staat hier los van. Elk voertuig, object zelfs, heeft een COG. Het is een aanduiding van het punt waarop de zwaartekracht aangrijpt op het specifieke object. Je wilt het zo laag mogelijk hebben om omvallen te voorkomen.
Dit is niet juist. De olie, wel/geen of viscositeit, doet niets met de rijhoogte. Tenzij je bedoeld diep in de veren zakken en terug veren na over een bult/door een kuil gereden te zijn.
….
Ik heb geen lekken gezien in de tijd dat ik de auto heb, of er nooit olie ingedaan is kan ik niet zeggen. Het is in ieder geval weer goed dat ik het check. Verklaart wel waarom de achterkant zover doorzakte.
Ik blijf bij mijn mening dat olie van ondergeschikt belang is bij onze manier van rijden. (al zijn er natuurlijk situaties te bedenken waarbij een verschil gemaakt had kunnen worden)
Concreet verlaag je hiermee je rijhoogte. De afstand tussen as en chassis is bij stilstand korter. In theorie kan de as hoger opveren, maar in de praktijk zal de as het chassis raken voordat het eind van de veer bereikt is. Je beperkt dus de veer travel.
….
Een tip die ik ook uitgeprobeerd heb is een hele simpele om de COG omlaag te krijgen. Zie blog artikel van Greg Vogel op Axial website. http://www.axialracing.com/blog_posts/1073926252 . Met monteren van onderste schokdemperoog op het punt waar de link zit vastgeschroeft. zo verlaag je de COG met 8mm t.o.v. standaard onderste schokdemper bevestigingspunt.
‘de voorkant zakte volledig in’; zoals gezegd olie doet niet ter zake, in dit geval is de constante van de gemonteerde veer te laag voor het gewicht van de auto. Stijvere veren monteren dus. Jou auto is blijkbaar te zwaar maar dit is ook waar deze Axial-mod voor bedoeld is; voor monteer je de zachtere achterveren, en achter maak je de hardere voorveren zachter door ze schuiner (tov de asbeweging) te monteren. Stilstaand zal de auto verder inveren. De rijhoogte, en dus de COG, komt lager te liggen. Dit geeft meer stabiliteit maar gaat ten koste van bodemvrijheid. De extra flex ontstaat omdat het gewicht van de auto makkelijker het hele bereik van de veer benut.…
Onderstaande foto setup is vooral op basis van de Axial blogartikelen en die was geen succes. De schokdemper is boven gemonteerd op het punt waar deze zou uitkomen bij omdraaien van de shock hoops, hardheid veren gewisseld en onderste schokdemper bevestiging op link punt gemonteerd. Dus de COG omlaag. Dit was werkbaar voor de achterkant, maar de voorkant zakte volledig in, waarbij er geen vering meer was en de panhard de servo gewoon raakte. Ook andere olie mocht niet helpen, de veer was te zacht en duidelijk teveel COG.
Een ‘teveel COG’? Elk object heeft een COG. Hoe hoog of hoe laag dit ook zit het gewicht blijft het zelfde dus ook de indrukking op de gegeven veer.
Wel tof dat je de moeite neemt dit allemaal uit te vogelen ( en er een epistel over te schrijven). Keep it up.
'Crazy Janey' (zelfbouw chassis, lc70 hardbody)
Baja Cherokee (zelfbouw, Jeep Cherokee hardbody)
Ramrod (VS4-10, kit)
Rip-Off (zelfbouw chassis, Toyota SR5 lexan)
Baja Cherokee (zelfbouw, Jeep Cherokee hardbody)
Ramrod (VS4-10, kit)
Rip-Off (zelfbouw chassis, Toyota SR5 lexan)
-
Cesco
- Donateur
- Berichten: 2871
- Lid geworden op: 03 okt 2017 13:09
- Locatie: Emmen
- x 1 x 13
- Gegeven waarderingen: 933 keren
- Ontvangen waarderingen: 1088 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Dit heeft even stilgelegen. Maar ik heb nu een setup die lijkt te werken.
Voor schokdempers setup. Olie WT30, originele veer soft (wit), schokdemper licht schuin gemonteerd. Onderste bevestigingspunt bevestigd op de schroef waarmee de link vastgezet wordt. Bovenkant iets schuin en lager als originele bevestigingspunt.
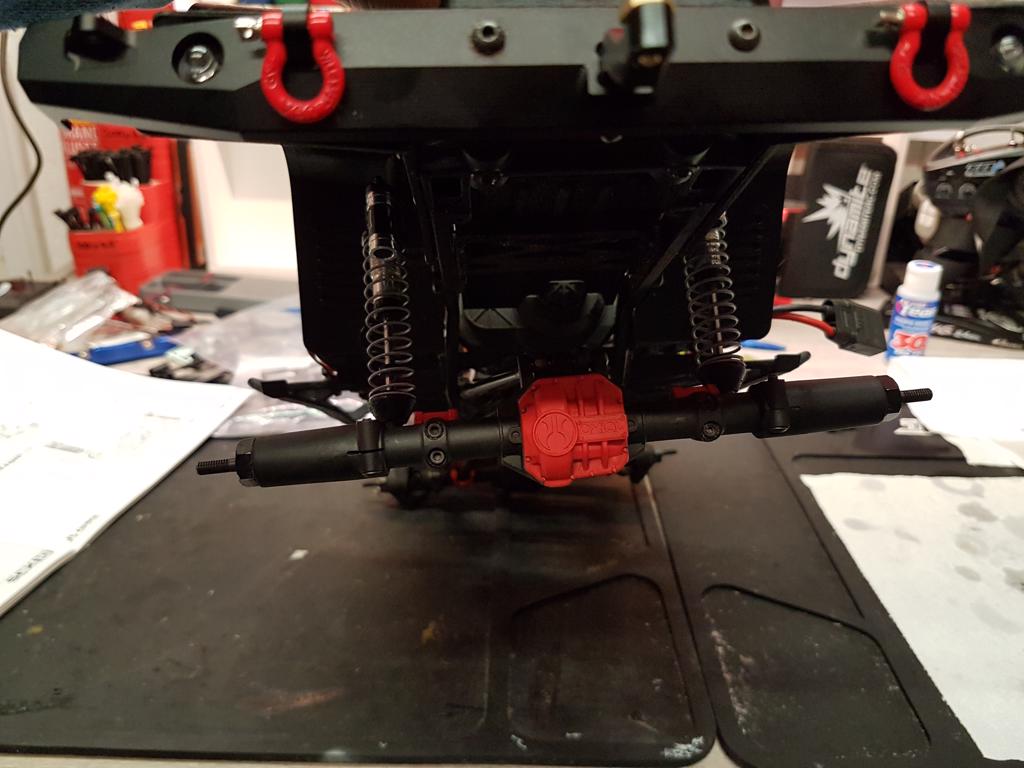
Achter schokdempers setup. Olie WT20, originele veer middel(geel), schokdemper schuin gemonteerd. Onderste bevestigingspunt bevestigd op de schroef waarmee de link vastgezet wordt. Bovenkant redelijk schuin en lager als originele bevestigingspunt. Foto volgt binnenkort.
Verder begonnen met de montage van een metalen voorbumper.
Voor schokdempers setup. Olie WT30, originele veer soft (wit), schokdemper licht schuin gemonteerd. Onderste bevestigingspunt bevestigd op de schroef waarmee de link vastgezet wordt. Bovenkant iets schuin en lager als originele bevestigingspunt.
Achter schokdempers setup. Olie WT20, originele veer middel(geel), schokdemper schuin gemonteerd. Onderste bevestigingspunt bevestigd op de schroef waarmee de link vastgezet wordt. Bovenkant redelijk schuin en lager als originele bevestigingspunt. Foto volgt binnenkort.
Verder begonnen met de montage van een metalen voorbumper.
Cesco RC Youtube / Cesco RC Instagram / Cesco's RC Collectie / Actueel bouwverslag: Tracrawler Build
-
Cesco
- Donateur
- Berichten: 2871
- Lid geworden op: 03 okt 2017 13:09
- Locatie: Emmen
- x 1 x 13
- Gegeven waarderingen: 933 keren
- Ontvangen waarderingen: 1088 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Tijdens de indoor meeting gisteren deed de Axial SCX10.2 het helemaal niet verkeerd.... tot dat de originele servo horn gestript werd. Wiel bleef tussen twee plankjes hangen, de PowerHD 20kg servo deed zijn werk en duwde door, maar was iets te krachtig voor de plastic tandjes van de originele plastic servo horn. Intussen is een aluminium versie besteld en onderweg. Die gaat indien niet op tijd voor meetings a.s. zaterdag en zondag op de Wraith en dan mag de Wraith zijn alu servo horn opofferen aan de SCX10.2. Aangezien de Wraith even niet kan rijden wegens onderhoud.
Cesco RC Youtube / Cesco RC Instagram / Cesco's RC Collectie / Actueel bouwverslag: Tracrawler Build
-
Wouterb
- Donateur
- Berichten: 1227
- Lid geworden op: 02 jun 2017 09:24
- Locatie: Medemblik
- x 16
- Gegeven waarderingen: 97 keren
- Ontvangen waarderingen: 144 keren
Re: Cesco's Axial SCX10.2 Jeep Cherokee
Je zou ook een handje plastic horns mee kunnen nemen. Als de alu versie wèl sterk genoeg is gaat er iets anders stuk en dat is vaak een duurder dingetje.
'Crazy Janey' (zelfbouw chassis, lc70 hardbody)
Baja Cherokee (zelfbouw, Jeep Cherokee hardbody)
Ramrod (VS4-10, kit)
Rip-Off (zelfbouw chassis, Toyota SR5 lexan)
Baja Cherokee (zelfbouw, Jeep Cherokee hardbody)
Ramrod (VS4-10, kit)
Rip-Off (zelfbouw chassis, Toyota SR5 lexan)
Wie is er online
Gebruikers op dit forum: Geen geregistreerde gebruikers en 2 gasten